Arbeitspaket Fahrzeug
Automatisierung Fahrzeuge
EasyMile EZ10 G2

Fahrzeug Easy Mile EZ10 G2
Der EZ10 des französischen Herstellers EasyMile ist ein typischer Vertreter der aktuell in Kleinserie produzierten, automatisierten Shuttlefahrzeuge für den ÖPNV. Aufgrund der im Serienzustand limitierten sensorischen Ausstattung, Berechnungsleistung und Fahrdynamik wird er im Rahmen des Projektes ABSOLUT hinsichtlich
- Antriebstechnik von 2 x 8 kW auf 50 kW Nennleistung bei 48 V
- Unterflurbatterie 45 kWh anstatt 31 kWh hinter Spritzwand
- Fahrwerk und Lenkung (nur Vorderachse gelenkt)
- ECE-konformes X-by-Wire-System
- E/E-Architektur
- Sensorik und Sensordatenverarbeitung
- Innovativem Arbeitsplatz für das Fahrpersonal
komplett umgebaut. Als reines X-by-Wire Fahrzeug ermöglicht das Fahrzeug perspektivisch den fahrpersonallosen Betrieb – aktuell steuert das Sicherheitsfahrpersonal über Joystick und Miniwheel im Falle der Notwendigkeit eines manuellen Fahreingriffs.
VW e-Crafter

Fahrzeug VW eCrafter
Die Automatisierung des elektrischen VW e-Crafter erfolgt mit einem deutlich geringeren Realisierungsrisiko auch für hohe Fahrgeschwindigkeiten, da ein bereits für diesen Geschwindigkeitsbereich zugelassenes Fahrzeug mit einem konventionellen Fahrerarbeitsplatz für das Sicherheitsfahrpersonal (Lenkrad, Fahr- und Bremspedal) mit einem Add-On X-by-Wire-System aufgerüstet wurde.
Besondere Herausforderungen sind:
- Erhalt der Serienfunktionalität des E/E-Systems trotz Automatisierungseingriff
- Flächenbündige Sensorintegration in die Fahrzeugkontur in fußgängerkritischen Bereichen
- Versorgung der Hochleistungsrechentechnik trotz limitierter Bordnetzleistung
Fahrzeuge Gegenüberstellung
Im Projektverlauf sollen die im Folgenden vorgestellten, zwei völlig unterschiedlichen Fahrzeugkonzepte für den automatisierten Betrieb im ÖPNV mit bis zu 70 km/h ertüchtigt werden, um die Übertragbarkeit und Modularität nachzuweisen. Dabei sollen Sensorkonzept, Sensordatenverarbeitung und Automatisierungs-Framework weitgehend identisch bleiben und nur die Fahrzeugschnittstelle sowie die Parametrierung individuell modifiziert werden.
Besondere Herausforderung ist bei den Forschungsarbeiten, dass beide Fahrzeugtypen zugelassen werden. Beide Fahrzeuge werden zur Erfassung und Bewertung der Verkehrs- und Umgebungsbedingungen mit umfangreichen Sensornetzwerken und zugehöriger Rechentechnik bei hoher Redundanz ausgestattet. Dabei finden neben Kameras vor allem Lidare und Radare Anwendung. Ausgehend von deren festgelegten Anordnung, Orientierung und Einbausituation sind die jeweiligen Adapter und Blenden zur Anbindung der Sensoren, Kameras und Antennen an die Tragstruktur konstruiert und gefertigt worden.
Zur Gewährleistung der avisierten Höchstgeschwindigkeit und der damit verbundenen höheren fahrdynamischen Beanspruchungen der EZ10-Fahrzeugstruktur erfolgte die Entwicklung und schweißtechnische Umsetzung neuer Fahrwerke mit einer vergrößerten Spurbreite.

Gegenüberstellung VW eCrafter und EasyMile EZ10 G2
Entwicklung Fahrgestell
Darüber hinaus sind infolge der vergrößerten Spurbreite breitere Radkästen erarbeitet und konstruktiv detailliert worden. Weiterhin wird die Türkinematik angepasst, da die derzeitige Bewegungskurve der beiden Türen mit den vergrößerten Radkästen kollidiert. Nach Untersuchung unterschiedlicher Kinematiksysteme und Bewertung des jeweiligen Umbauaufwandes ist eine Vorzugsvariante abgeleitet, konstruktiv detailliert und umgesetzt worden.

Darstellung Entwicklung Fahrgestell
Ein weiterer Schwerpunkt ist die Auslegung des Arbeitsplatzes für den Sicherheitsfahrer. Die Platzprobleme im relativ kleinen Fahrgastraum und insbesondere die Sichtfeldproblematik infolge der sehr breiten A-Säulen führen zu einem Konzept eines stehenden Fahrers mit entsprechender Fixierung. Im Rahmen umfangreicher Sichtfeldanalysen wird der Einsatz eines Kamera-/Monitor-Systems als zielführend weiterverfolgt, mit dem der verdeckte Sichtbereich zulassungskonform reduziert wird.

Bildunterschrift Darstellung Entwicklung Arbeitsplatz Sicherheitsfahrer
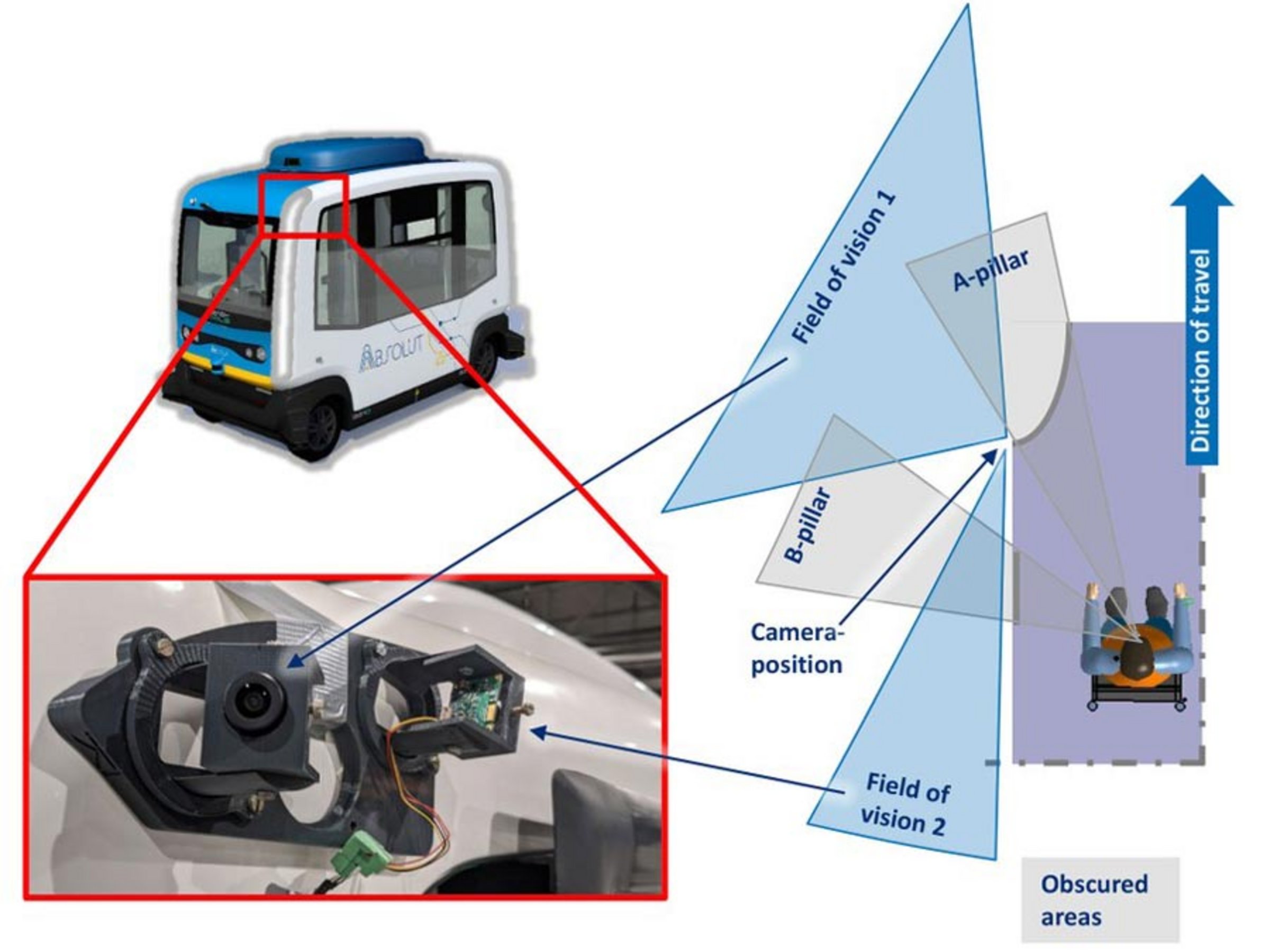
Bildunterschrift Darstellung Entwicklung Arbeitsplatz Sicherheitsfahrer
Wichtige Projektergebnisse
X-by-Wire

Funktionalität des X-by-Wire Systems
Sensorik
Die Automatisierung der Projektfahrzeuge setzt die zuverlässige Erfassung und Auswertung der Fahrzeugumgebung voraus. Die Fahrzeuge sind dafür mit diversen Sensoren ausgestattet, die eine 360°-Abdeckung der Umgebung mit drei unabhängigen Sensorsystemen ermöglichen.
Zusätzlich zur Seriensensorik des VW e-Crafter (Frontradar, Frontkamera und Rückfahrkamera) wurden daher innerhalb des Forschungsprojekts 5 Radarsensoren, 8 Kameras und 9 Lidarsensoren in das Fahrzeug integriert (siehe Bild). Die Kombination aus Radar-, Kamera- und Lidar-Technik gewährleistet selbst bei ungünstigen Witterungsbedingungen eine genaue und robuste Wahrnehmung der Fahrzeugumgebung (siehe Bild).

Darstellung der Sensorik im VW eCrafter
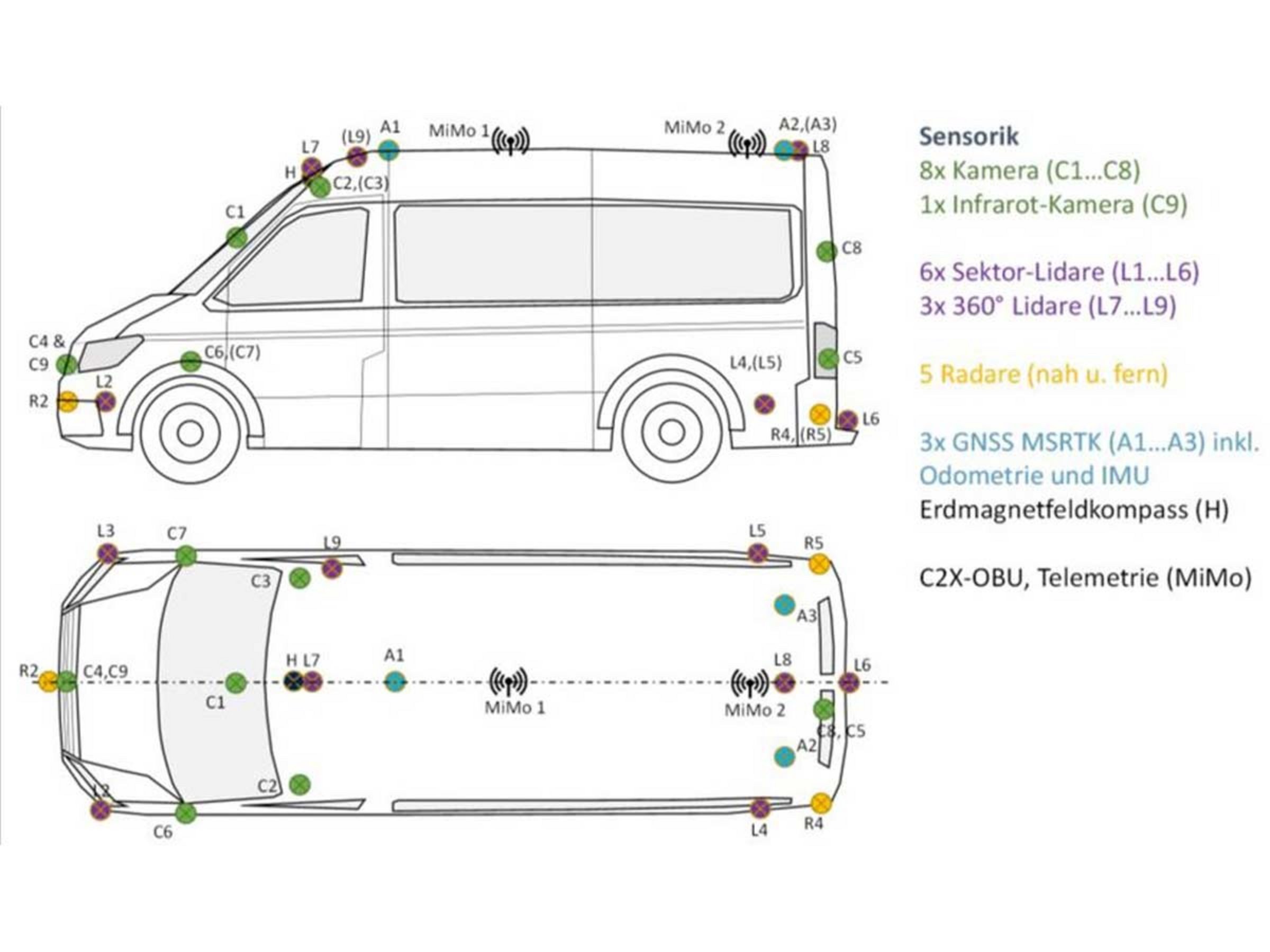
Darstellung der Sensorik im VW eCrafter
Für eine hochgenaue Bestimmung der eigenen Position ist das Fahrzeug mit 3 auf dem Dach befindlichen GNSS-Antennen sowie einem Erdmagnetfeldsensor ausgestattet (siehe auch Kapitel Lokalisierung). Zwei ebenfalls auf dem Fahrzeugdach platzierte MiMo-Antennen ermöglichen die Kommunikation mit der Infrastruktur (z.B. Lichtsignalanlagen, GNSS-Korrekturdatendiensten) sowie die Übermittlung von Telemetriedaten an Leitstelle und Entwickler.

Darstellung der 3D-Sensor-Redundanz
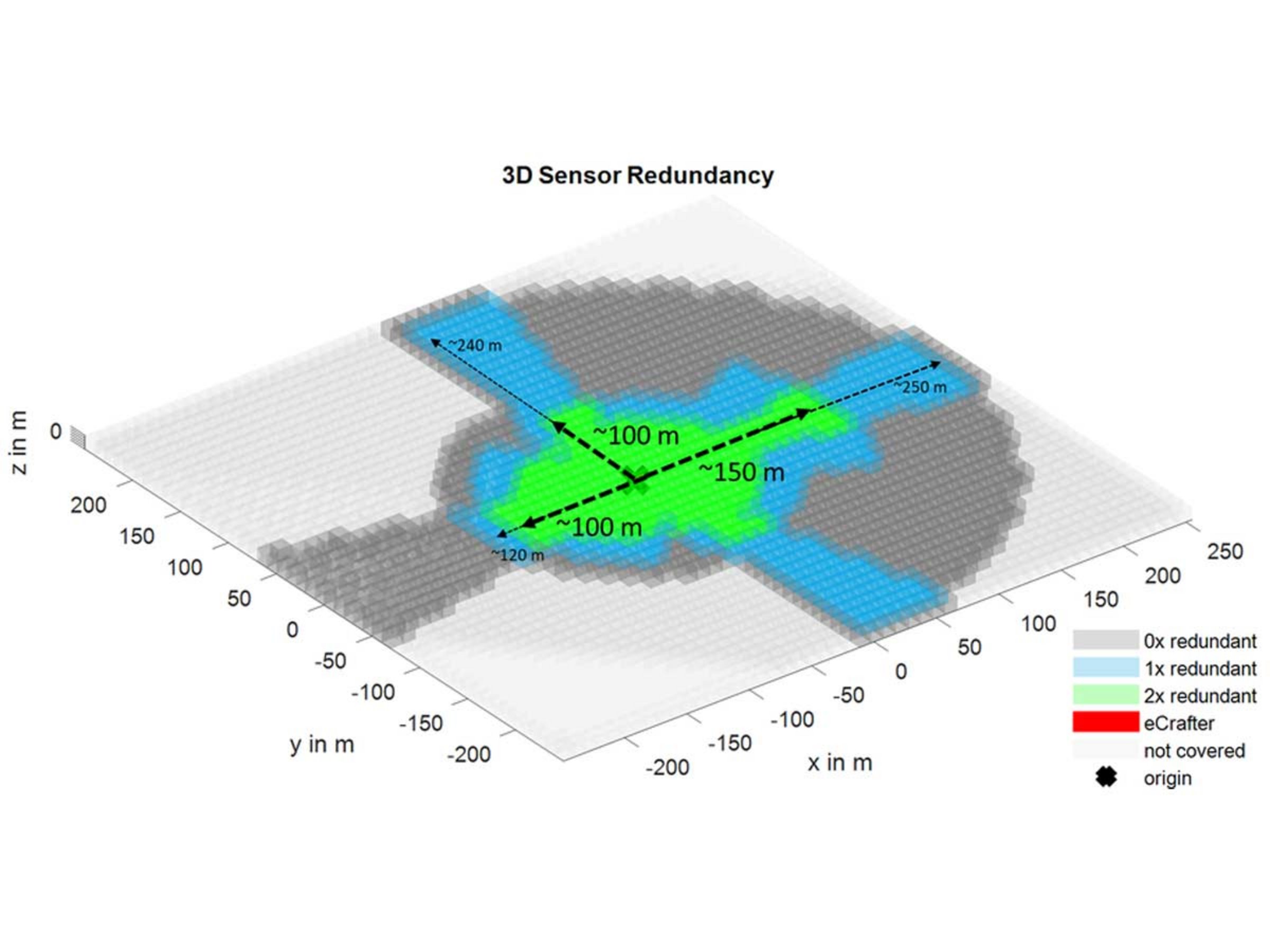
Darstellung der 3D-Sensor-Redundanz
Sensordatenverarbeitung
Die hohe Bandbreite der eingehenden Sensordaten stellen für das Datenverarbeitungssystem neben der benötigten Robustheit für einen dauerhaften Einsatz und der Notwendigkeit zur kontinuierlichen Überwachung des eigenen Wahrnehmungshorizonts eine Herausforderung dar.
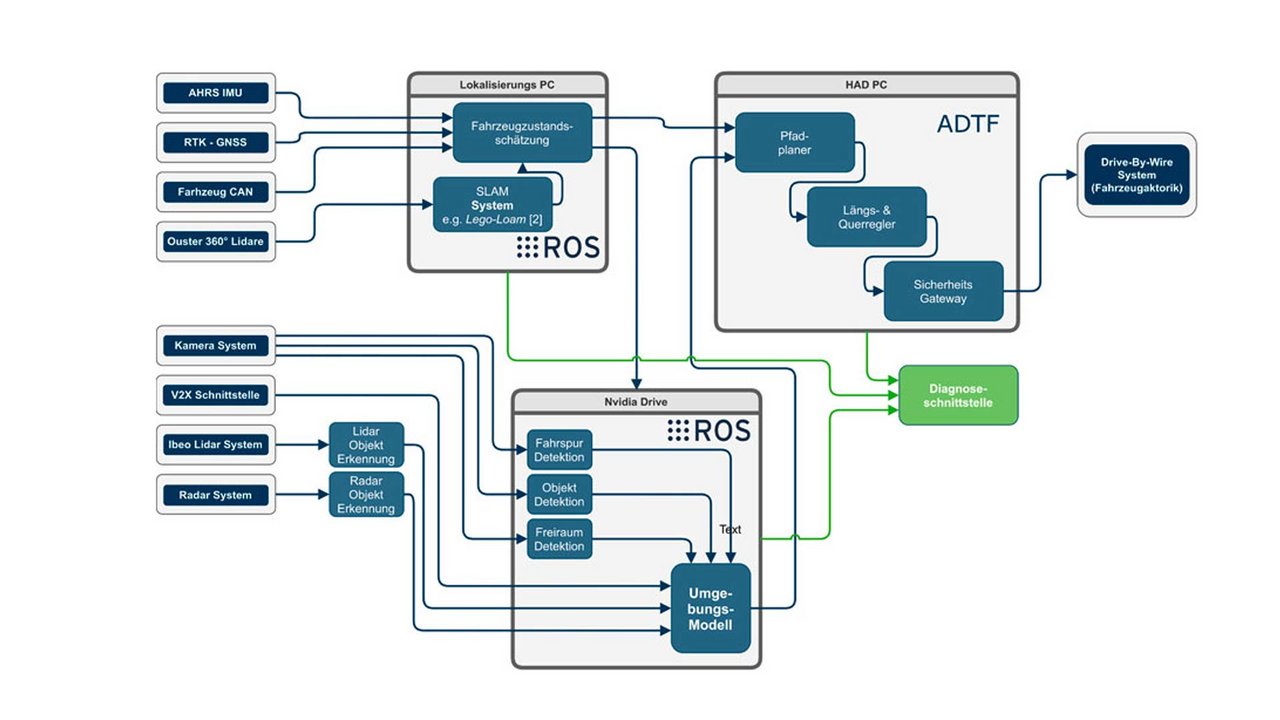
Schaubild Sensordatenverarbeitung im Fahrzeug
Daher wird für die Verarbeitung der Sensordaten zur Umgebungserfassung eine Nvidia Drive AGX Plattform eingesetzt, deren Stärken insbesondere in der Extraktion von Informationen aus Kamerabildern liegt. Dieses System wird um einen separaten CarPC zur Lokalisierung und Eigenzustandsschätzung ergänzt. Dieser fusioniert die Signale des GNSS-Systems mit denen der IMU und der 360° Lidare.
Durch die Umsetzung als verteiltes System unter Verwendung des Robot Operating Systems (ROS) stehen alle Informationen auf beiden Systemen zur Verfügung.
Ein Umgebungsmodell aggregiert alle aus dem Computer Vision System, der Eigenzustandsschätzung und des C2X-Interfaces zu einem konsistenten Abbild des Fahrzeugumfelds. Auf Basis dieser Informationen kann ein drittes Rechnersystem (HAD-PC im Schema) eine Fahrentscheidung treffen, respektive einen abzufahrenden Pfad planen.
Um die Daten aus dem Kamerasystem nutzen zu können, werden Machine-Learning-Modelle zur Erkennung der Fahrbahnmarkierungen, von Objekte und des befahrbaren Freiraums rund um das Fahrzeug genutzt und erweitert. Damit können verschiedene bewegte Objekte, wie PKW und Fußgänger, aber auch Ampeln und Schilder erkannt und klassifiziert werden. Durch die Fusion mit den Punktwolken der Lidare ist eine Transformation der Informationen aus dem Kamerabild in Weltkoordinaten möglich.

Darstellung der Spur-, Objekt- und Freiraumerkennung
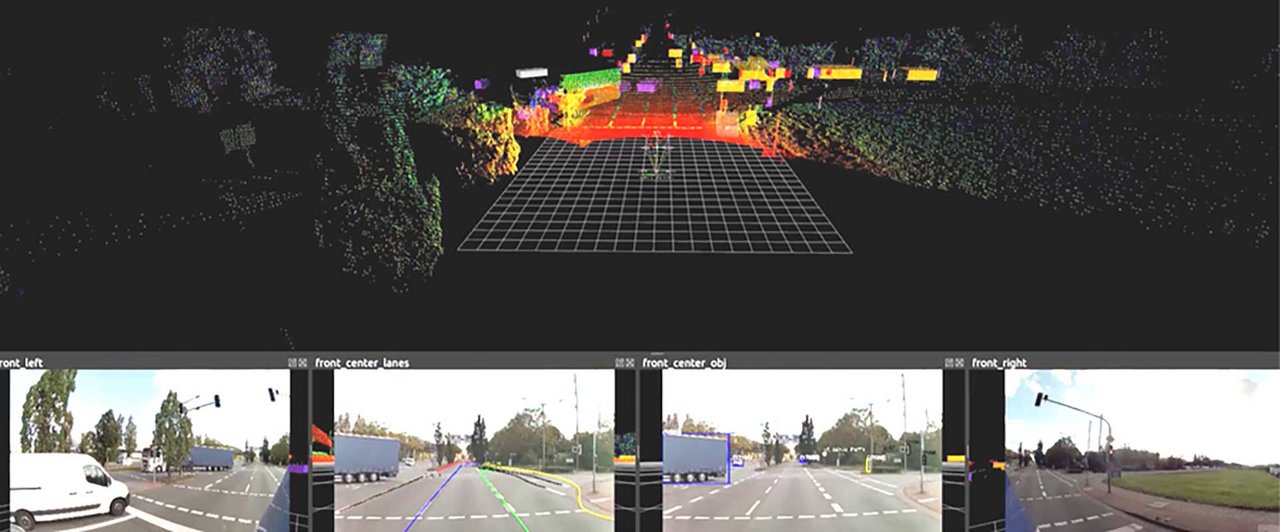
Darstellung der Sensorverarbeitung bei einer Messfahrt
Das Video zeigt Ausschnitte/einen Ausschnitt einer Messfahrt auf dem Testkorridor im Oktober 2021. Dargestellt sind die detektierten Objekte der Frontsensorik (Ibeo-Lidar, Radar, Kamera), sowie die Punktwolke des rotierenden Front-Lidars und das Kamerabild der Front-Kamera. Die unterschiedlichen Farben der Objekte geben die Klassifikation an.
Lokalisierung
Im Zuge des hochautomatisierten Fahrens ist die robuste und exakte Kenntnis der eigenen Position und räumlichen Orientierung (zusammen Pose) von elementarer Bedeutung.
Entlang der Strecke existieren dabei verschiedene Herausforderungen, die diese Aufgabe für ein einzelnes Sensorsystem erschweren:
- GNSS Verschattung durch hohe Gebäude oder Brücken
- Teilweise fehlende bzw. abgenutzte Fahrspurmarkierungen
- Chaotische Veränderung des Fahrzeugumfelds (beispielsweise in Menschenmengen auf dem Messegelände Leipzig)
- Wechselnde Licht- und Witterungsbedingungen für den ganzjährigen Betrieb
- Armut an Umgebungsmerkmalen (Referenzpunkten) für Umfeldsensoren im interurbanen Betrieb
Um diesen Randbedingungen zu begegnen, kommen zur Lokalisierung des Fahrzeugs neben einem RTK-GNSS-System und einem Magnetfeldsensor zur Bestimmung der Fahrtrichtung auch Informationen von Lidar- und Kamerasensoren zum Einsatz. Deren Signale werden in einem mehrstufigen Filtersystem fusioniert, um eine möglichst genaue und zuverlässige Schätzung der Position zu erreichen.
Die folgende Abbildung zeigt exemplarisch eine mit einem 360°-Lidar während der Fahrt erstellte Karte der Umgebung. Dabei werden aus jedem Scan des Sensors Merkmale wie Kanten und Ebenen extrahiert und aus deren Verschiebung zwischen mehreren Zeitpunkten die relative Bewegung des Fahrzeugs errechnet.

Darstellung der Umgebung aus Sicht des 360°-Lidar

Darstellung der Umgebung aus Sicht des 360°-Lidar
Car2X
Ausgehend von einer Road-Side Unit am jeweiligen Steuergerät der Lichtsignalanlage empfängt das Fahrzeug folgende nach ETSI standardisierte Protokolle:
- SPaTEM (Signal, Phase and Timing Extended Message)
- MAPEM (Map Extended Message).
Damit wird gewährleistet, dass das Fahrzeug unter anderem stets Informationen zur Position des für ihn relevanten Signalgebers, dessen aktuellen Signalzustand und die Dauer der Signalphase erhält.
Somit steht neben der direkten optischen Erkennung des Signalgebers eine unabhängige digitale Information zur Fahrentscheidung zur Verfügung.
Des Weiteren sendet das Fahrzeug das ebenso nach ETSI standardisierte Protokoll CAM (Cooperative Awareness Messages) bzw. für ÖPNV-Fahrzeuge CAM-R09 aus. Mithilfe dieser Nachricht wird das Fahrzeug an der Lichtsignalanlage an- und abgemeldet.
Vernetzung E/E-Architektur

IT-Rack im VW eCrafter
Große Herausforderungen für den Aufbau einer leistungsfähigen, anforderungsgerechten E/E-Architektur in den automatisierten Fahrzeugen stellen
- die unterschiedlichen (begrenzten) Schnittstellen und Bus-Systeme der Sensoren und Recheneinheiten
- die erforderlichen Bandbreiten und niedrigen Latenzen
- der Informationsaustausch über verschiedene Domänen hinweg
- die Integration in eine bestehende Fahrzeugarchitektur
- die Kapselung sicherheitsrelevanter Teilsysteme
- die robuste Anbindung betriebskritischer Systeme
- die begrenzte elektrische Leistung d. Bordnetze
- die räumliche Trennung unterschiedlicher EMV-Kategorien im Fahrzeug dar.
Das Bild zeigt die resultierende E/E-Struktur mit der informationstechnischen Vernetzung der Hauptkomponenten in den ABSOLUT-Fahrzeugen. Vergleichbare Datenquellen mit niedriger Datenrate wurde dabei zusammengefasst (z.B. Objektdaten d. Sektorlidare 1 -6, Objekdaten der Radare), datenintensive Quellen hingegen direkt zu den Verarbeitungseinheiten geführt (Bilddaten der Kameras 1- 9, Punktwolken der Lidare 7 und 8).

Vernetzung der Systemkomponenten im eCrafter
Über die CAN-Interfaces / Gateways und Ethernet-Switche wird durch entsprechendes Mapping bzw. aktives Management einerseits der selektive Informationsaustausch zwischen den Kommunikations-Teilnetzen ermöglicht, andererseits aber auch eine gezielte Abschottung vorgenommen. Im folgenden Video sehen Sie den Ausbau des eCrafters im Zeitraffer.
Test, Zulassung, Inbetriebnahme
Für die sichere Inbetriebnahme der Fahrzeuge im Straßenverkehr sind umfangreiche Prüfschritte notwendig. Neben allgemeinen, von der DEKRA durchgeführten Homologationstests wie dem Brems- und Lenkverhalten, sind zusätzliche Nachweise über die Sicherheit von verwendeten Systemen und Komponenten zu erbringen.
Um auf möglichst alle denkbaren Situationen vorbereitet zu sein, wurde während des Zulassungsprozesses eine Gefährdungsanalyse für die Fahrzeuge erstellt. In dieser Analyse werden für alle sicherheitsrelevanten elektrischen und elektronischen Systeme ausgehend von der Sollfunktion mögliche Fehlfunktionen aufgelistet und bzgl. Schwere der Gefährdung, Auftretenswahrscheinlichkeit und Kontrollierbarkeit kategorisiert. Daraus werden Sicherheitsziele für die Entwicklung sowie ein sicherer Zustand für das Eintreten des Fehlers definiert.
Da beide Fahrzeuge im Vergleich zur Basis in einem deutlich größeren Umfang über elektrische und elektronische Systeme verfügen, ist eine erneute Prüfung der Elektromagnetischen Verträglichkeit (EMV) nach ECE R10 notwendig. Diese wurde von der SLG Prüf- und Zertifizierungs GmbH durchgeführt und entwicklungsbegleitend durch das FTZ der Westsächsischen Hochschule Zwickau unterstützt.

Frequenzabhängiger Pegelverlauf als Ergebnis der EMV-Prüfung
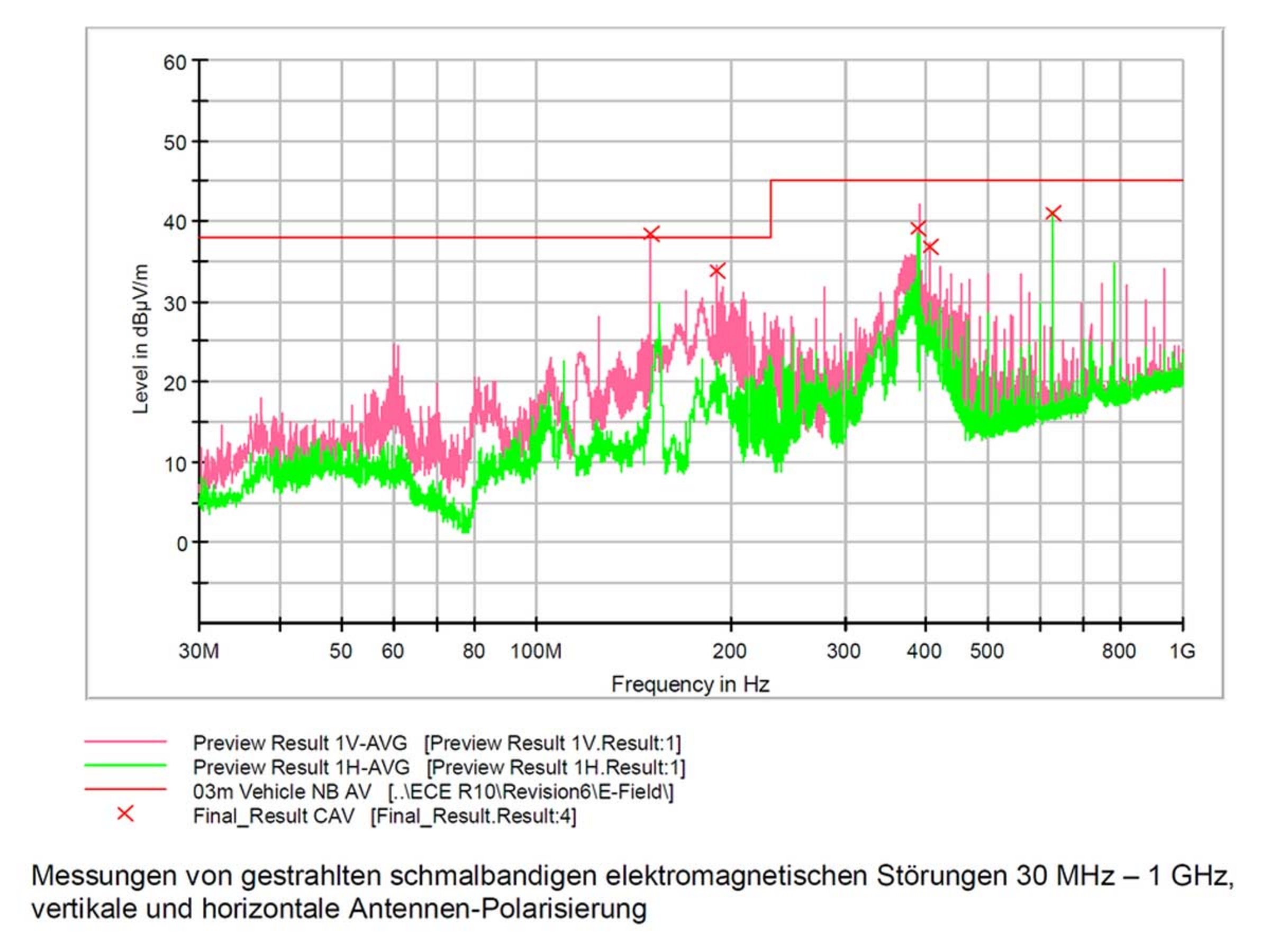
Frequenzabhängiger Pegelverlauf als Ergebnis der EMV-Prüfung

VW eCrafter während der EMV-Prüfung nach ECE R10
Voraussetzung für die Zulassung des automatisierten Betriebs war außerdem ein Unfalldatenspeicher (UDS). Dieser speichert als eine Art Black Box während der Fahrt verschiedene Fahrzeugparameter auf, die dazu dienen Verkehrsunfälle zu rekonstruieren und bei Verkehrsverstößen aufzuklären, ob Fahrer oder Fahrzeug verantwortlich sind. Außerdem dokumentiert der Speicher wann und wo ein Wechsel von automatisierten auf manuellen Betrieb und umgekehrt stattgefunden hat. Aufgezeichnete Parameter sind unter anderem:
Geschwindigkeit, Position, Zeit, Fahrmodus (automatisiert/manuell), Betätigung der Bedienelemente.
Nach Erstellung des DEKRA Änderungsgutachtens nach §21 StVO vom 12. 08. 2021 und dem Gutachten zur Erlangung einer Ausnahmegenehmigung nach §70 StVZO, sowie der Erteilung der Ausnahmegenehmigung durch das LASuV (Landesamt für Straßenbau und Verkehr) ist es möglich, den VW eCrafter zuzulassen und manuell im öffentlichen Straßenverkehr zu bewegen. Die Ausnahmegenehmigung ermöglicht es den Entwicklern im Rahmen der Erprobung Änderungen am Fahrzeug durchzuführen, ohne eine erneute Abnahme des Gesamtfahrzeugs durchführen zu müssen. Dadurch kann der Entwicklungsprozess deutlich agiler gestaltet und Optimierungen schneller umgesetzt werden.